
1、驱动相机1
驱动HAP雷达,在ros2且驱动已安装完成的前提下,需找到雷达驱动文件夹所在路径
cd ws_livox/
source install.setup.sh
ros2 launch livox_ros_driver2 rviz_HAP_launch.py驱动相机,,install文件夹下gscam_launch.py用于修改相机IP地址
cd ..
cd gscam2/
source install/setup.sh
ros2 launch gscam gscam.launch.py通过设置雷达rviz中add添加,by topic→image→rviz
2、驱动相机2
rviz不显示点云信息,优先考虑IP错误。首先去install下找到对应雷达的config文件,确认IP并ping,若不通考虑IP更改,继而选择wireshark确认具体雷达IP地址。
3、相机内参标定
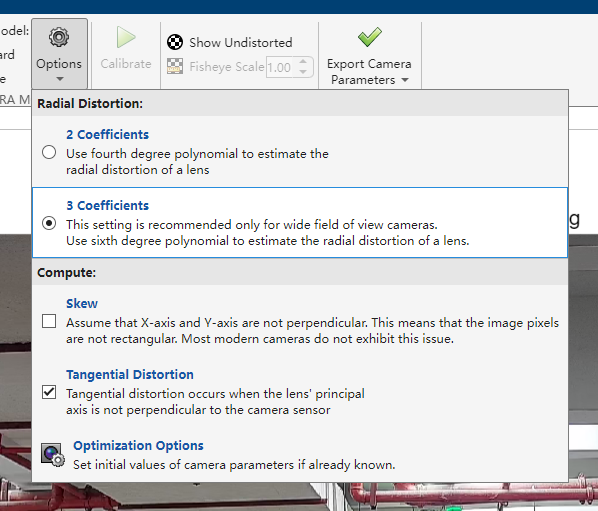
打开matlab,在APP中选择camera calibrator进行相机内参标定,add image→全选→ checkboard→10 centimeters→high distortion,图片加载后,options中选择径向/切向畸变参数,运用calibrate标定,选择0.5像素过滤标定欠佳的样本,确保标定准确性,然后右键图片remove后recalibrate导出结果,参数记录如下:
hap_108:
K(内参矩阵):
1899.24967024670 0 768.656828652617
0 1900.61788976051 746.700334371105
0 0 1
RadialDistortion:
-0.506708329891789 0.467699987533127 -0.229441405461722
TangentialDistortion:
-0.00623623263379616 0.0295804821563305
hap_109:
K:
845.849222437139 0 1003.51563616131
0 852.608526715961 529.769860782243
0 0 1
RadialDistortion:
-0.189761242266482 1.79778794802367 -9.05000176192234
TangentialDistortion:
-0.00160958318653854 0.00674973655509358
mid360_110:
K:
978.498593222687 0 987.570866343477
0 980.586951636292 605.483743148585
0 0 1
RadialDistortion:
-0.395753007325228 0.204068967720898 -0.0451851173756056
TangentialDistortion:
-0.00902874776801826 -0.00259830272335367
mid360_111:
K:
691.680309232192 0 1019.86001054515
0 695.122253531840 546.904367226709
0 0 1
RadialDistortion:
-0.158160613526436 0.142083916816886 -0.0783391303771136
TangentialDistortion:
-0.00866140051248155 -0.000815544578287927
mid360_112:
K:
1061.14411799045 0 998.515714368880
0 1066.19291665375 588.891679703296
0 0 1
RadialDistortion:
-0.521237350173838 0.513365511267123 -0.412836662037985
TangentialDistortion:
-0.00764717738231407 -0.00976679621905015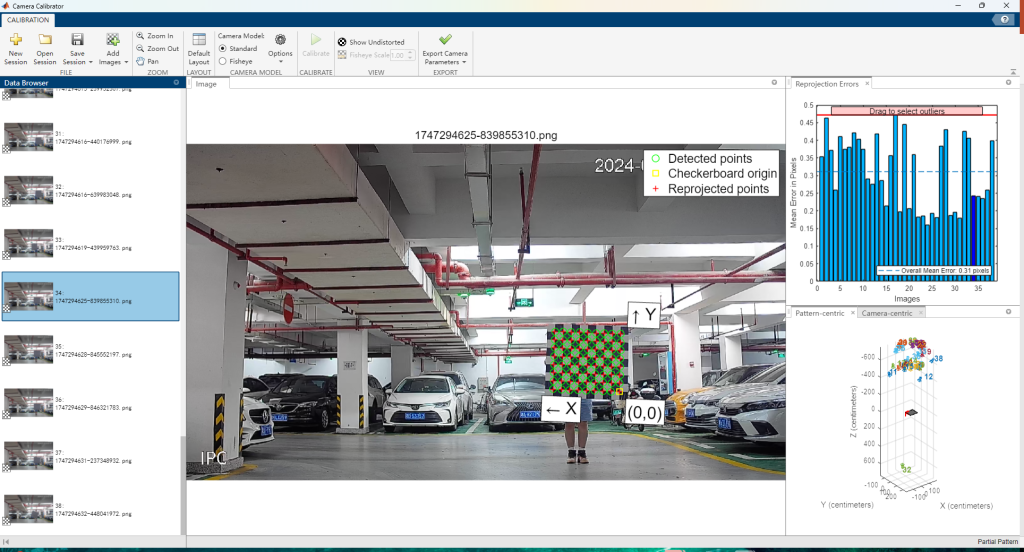




使用openclib进行标定,选择两张图片以及其对应点云,使用matlab标定的参数,在center_camera-intrinsic.json文件中进行参数修改,如下所示:
{
"center_camera-intrinsic": {
"sensor_name": "center_camera",
"target_sensor_name": "center_camera",
"device_type": "camera",
"param_type": "intrinsic",
"param": {
"img_dist_w": 1920,
"img_dist_h": 1080,
"cam_K": {
"rows": 3,
"cols": 3,
"type": 6,
"continuous": true,
"data": [
[
1899.24967024670,
0,
768.656828652617
],
[
0,
1900.61788976051,
746.700334371105
],
[
0,
0,
1
]
]
},
"cam_dist": {
"rows": 1,
"cols": 4,
"type": 6,
"continuous": true,
"data": [
[
-0.506708329891789,
0.467699987533127,
-0.00623623263379616,
0.0295804821563305,
-0.229441405461722
]
]
}
}
}
}需要在/home/cc/SensorsCalibration-master-lidar2camera/lidar2camera/manual_calib文件夹下运行下述代码:
./bin/run_lidar2camera data/hap108_01.png data/hap108_01.pcd data/center_camera-intrinsic.json data/top_center_lidar-to-center_camera-extrinsic.json通过readme进行openclib手动操作,如下所示:
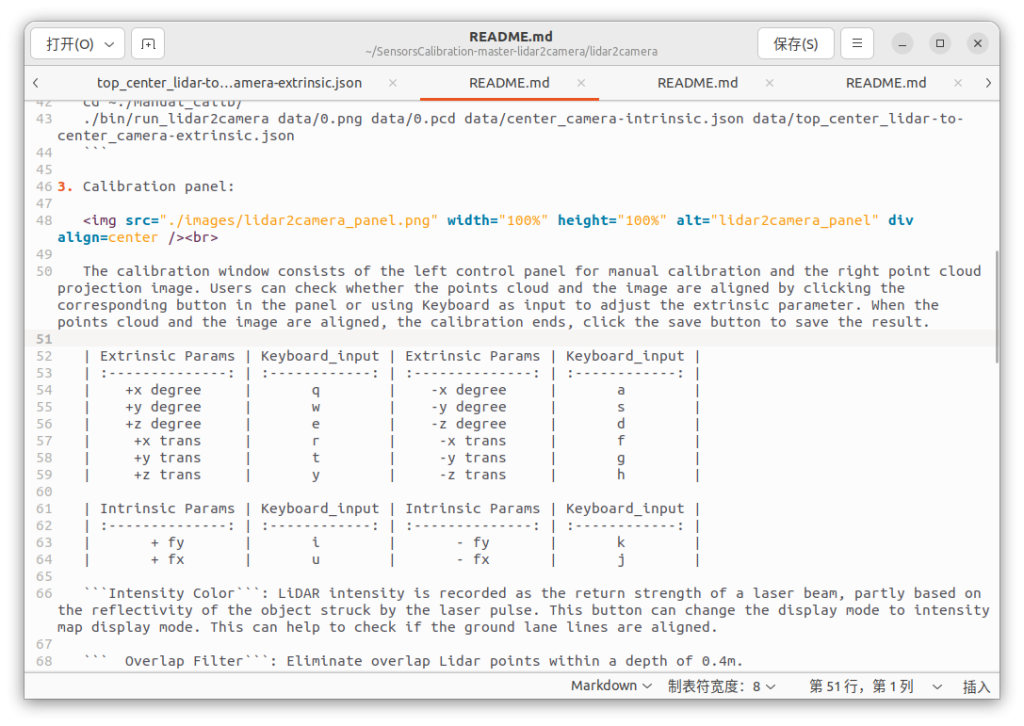
最后得到如下所示的外参矩阵:
hap_108:
0.0796043 -0.996661 -0.0181279 -0.0634501
-0.0179795 0.016747 -0.999698 0.12828
0.996665 0.0799063 -0.0165864 0.0646923
0 0 0 1
mid360_111:
0.98676 0.076317 -0.143105 -0.224061
-0.145393 0.0252938 -0.989051 -0.0834699
-0.0718618 0.996763 0.0360549 1.11061
0 0 0 1


